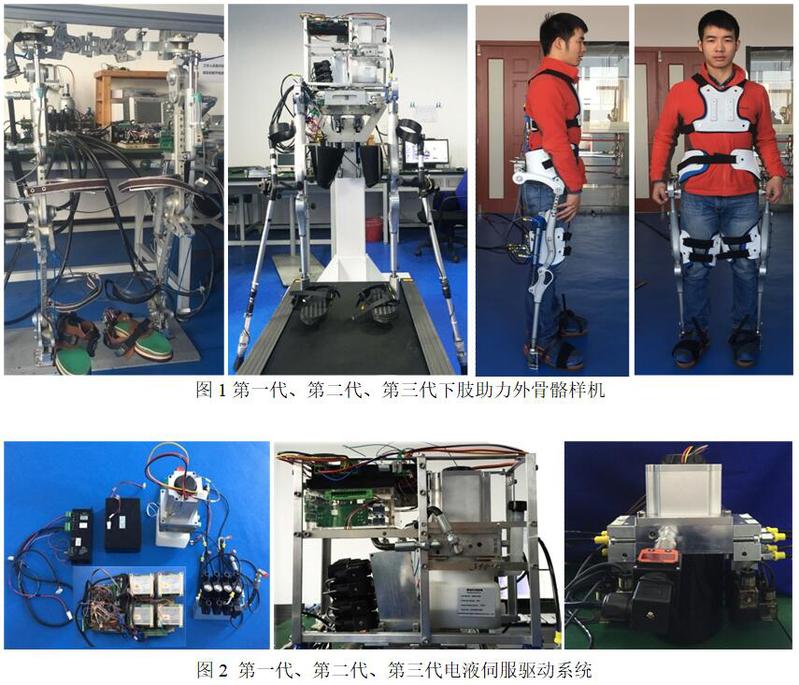
1.可穿戴型下肢外骨骼助力机器人研发
与中国科学院合肥物质科学研究院、芜湖欧凯罗博特机器人有限公司联合,深入开展可穿戴型下肢助力机器人关键技术攻关,在人在回路人机交互机理和实现方法、行走步态规划、防跌倒稳定性控制、行走平顺性控制策略、驱动装置和电源管理系统等关键技术方面取得标志性成果。该研究工作获得国家自然科学基金、安徽省科技攻关计划等项目支持。
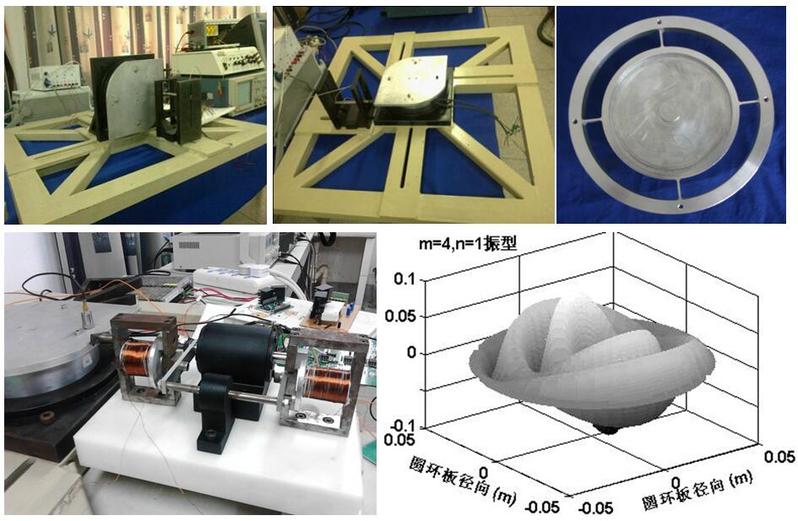
2.电阻应变片式六维力传感器动态耦合特性研究
许德章教授主持的国家自然科学基金项目“电阻应变片式六维力传感器动态耦合特性研究”,针对动载工作环境下,因耦合误差导致六维力传感器测量精度急剧下降的现实,运用克希霍夫弹性薄板理论,描述弹性体的动力学行为,基于能量分配原理,研究动态耦合关系和误差形成过程。项目的研究成果为弹性体动态结构优化,以及动态解耦在线、实时的实现奠定了理论基础;实验手段为传感器动态性能测试和标定提供了必要条件。
3.全地形多用途移动机器人关键技术研究
汪步云副教授主持的芜湖市科技计划项目“全地形多用途移动机器人关键技术研究及其工程示范应用”,基于机器人学和电机电磁驱动理论,采用现代控制理论与系统科学研究方法以及智能移动机器人的技术手段,研究多用途移动机器人自主行走和智能化作业的理论和实践方法,实现移动机器人复杂环境自主决策。

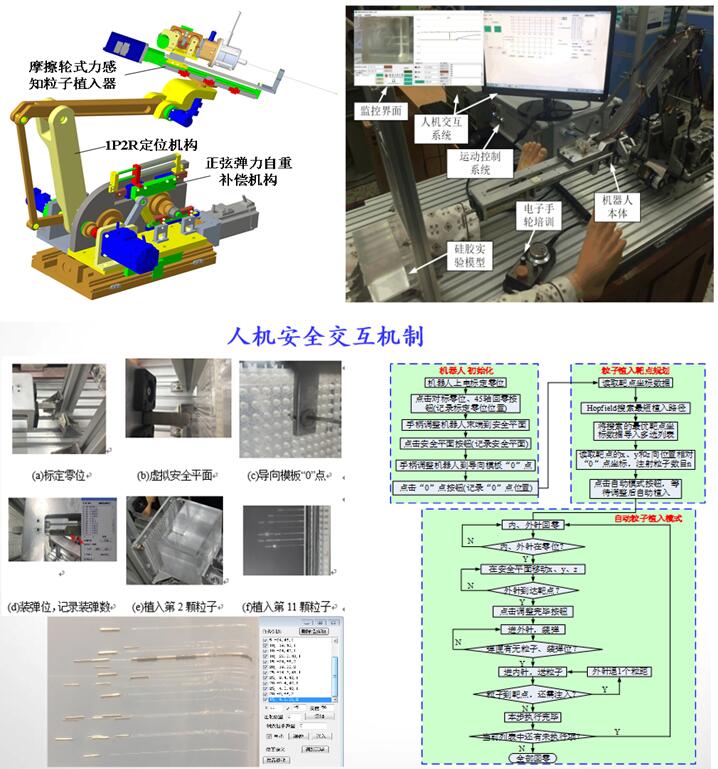
4.靶向放疗机器人关键技术研究
梁艺博士主持的靶向放疗机器人关键技术研究工作,以靶向粒子植入手术为背景,重点研究机器人靶向置针机理、安全交互机制以及机器人干预系统研发。靶向放疗机器人是微创介入治疗机器人干预系统的重要分支,适用于典型临床放射外科手术场景(如药物植入、活检穿刺、激光治疗、射频消融)。